Статическим называют такое состояние гидропривода, когда его выходное звено находится в состоянии покоя или движется с постоянной скоростью (такой режим также называется установившимся режимом работы привода). Переход гидропривода из одного статического состояния в другое называется переходным процессом. Статическое состояние является частным случаем переходного процесса, поэтому вначале целесообразно разработать математическую модель для анализа переходных процессов в гидроприводе, а затем из нее получить уравнения модели статических состояний привода.
Модель для анализа переходных процессов. Математическая модель для анализа переходных процессов в гидроприводе представляет собой систему нелинейных дифференциальных уравнений в форме Коши. Методика получения таких моделей включает следующие этапы: построение динамической модели гидропривода, получение уравнений математической модели, описание характеристик внешних воздействий на привод, вычисление коэффициентов уравнений модели.
Динамическая модель разрабатывается с помощью метода сосредоточенных масс на основе принципиальной гидравлической схемы привода.
Гидропривод является разнородной технической системой, содержащей гидравлические и механические взаимодействующие элементы. В связи с этим в качестве фазовых переменных модели, характеризующих состояние системы гидропривода, принимаем: для гидравлических элементов расход Q и давление р жидкости, а для механических элементов - их перемещение х и скорость V.
Динамическая модель проектируемого привода представлена на рисунке 8.1.
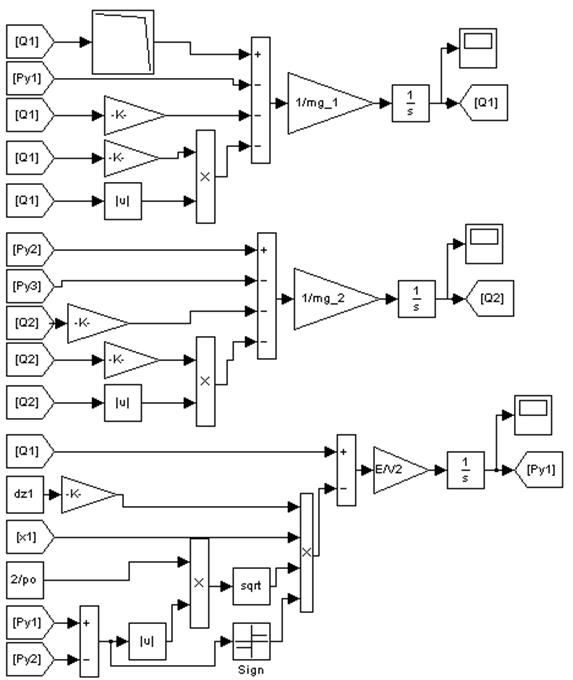
Рисунок 8.1 − Динамическая модель привода
На динамической модели обозначены: ![]() — расходы жидкости в гидролиниях;
— расходы жидкости в гидролиниях; ![]() — давления в узлах;
— давления в узлах; ![]() — коэффициенты масс жидкости в гидролиниях;
— коэффициенты масс жидкости в гидролиниях; ![]() — коэффициенты гидравлического сопротивления гидролиний;
— коэффициенты гидравлического сопротивления гидролиний; ![]() — коэффициенты гидравлической жесткости объемов жидкости, сосредоточенных в узлах;
— коэффициенты гидравлической жесткости объемов жидкости, сосредоточенных в узлах; ![]() — давление, развиваемое насосной установкой; m— масса груза; x — перемещение золотника;
— давление, развиваемое насосной установкой; m— масса груза; x — перемещение золотника; ![]() — коэффициент вязкого трения в гидроцилиндрах соответственно; F — сила, прикладываемая к поршню гидроцилиндра со стороны рабочих органов машины; Aпн — площадь плунжера со стороны напорной полости цилиндра, м3; Aпс — площадь плунжера со стороны сливной полости цилиндра, м3.
— коэффициент вязкого трения в гидроцилиндрах соответственно; F — сила, прикладываемая к поршню гидроцилиндра со стороны рабочих органов машины; Aпн — площадь плунжера со стороны напорной полости цилиндра, м3; Aпс — площадь плунжера со стороны сливной полости цилиндра, м3.
По динамической модели составим математическую модель привода:
|
|
(8.1) |
|
|
(8.2) Внимание!
Если вам нужна помощь в написании работы, то рекомендуем обратиться к
профессионалам. Более 70 000 авторов готовы помочь вам прямо сейчас. Бесплатные
корректировки и доработки. Узнайте стоимость своей работы.
|
где Fст − реакция стенки;
сст – коэффициент жёсткости материала стенки;
h − ход поршня. Остальные обозначения аналогичны обозначениям на динамической модели.
Коэффициенты системы уравнений (8.1) вычисляются по следующим формулам.
Значение коэффициентов μгл и μгн:
|
|
(8.3) |
|
|
(8.4) |
 ;
; ,
,где ![]() − кинематическая вязкость жидкости, м2/2;
− кинематическая вязкость жидкости, м2/2;
![]() − коэффициент потерь на трение при турбулентном потоке;
− коэффициент потерь на трение при турбулентном потоке;
n − число участков рассматриваемой гидролинии;
li − длина i − го участка гидролинии, м2;
![]() − коэффициент местного сопротивления.
− коэффициент местного сопротивления.
Коэффициент
|
|
(8.5) |
 ,
,где n − число участков рассматриваемой гидролинии;
Vi − объем i - го участка гидролинии;
Ai − площадь поперечного сечения i - го участка гидролинии.
Коэффициент
|
|
(8.6) |
 ,
,где E − модуль объемной упругости жидкости, Па;
V − объем жидкости, сосредоточенный в узле, м3.
Модель для анализа статических состояний. Математическая модель для анализа статических состояний гидропривода представляет собой систему нелинейных алгебраических уравнений, получаемую из уравнений динамики привода путем приравнивания к нулю производных фазовых переменных модели.
Математическая модель для анализа статических состояний проектируемого гидропривода:
|
|
(8.7) |
В системе (8.6) искомыми переменными являются ![]() ,
, ![]() ,
,![]() ,
, ![]() ,
, ![]() ,
,![]() ,
, ![]() .
.
Поможем написать любую работу на аналогичную тему