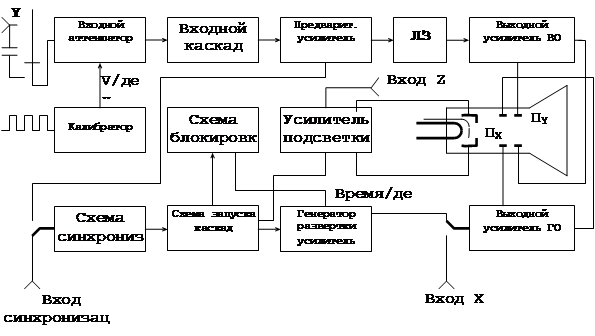
Входной сигнал подается на аттенюатор канала ВО (вертикального отклонения), который обеспечивает необходимое ослабление сигнала. Сигнал задерживается ЛЗ (линия задержки) на время, необходимое для срабатывания канала горизонтального отклонения. Устойчивость изображения достигается синхронизацией частоты сигнала развертки частотой исследуемого сигнала.
 |
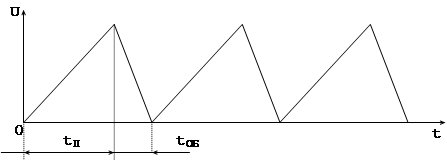
Режим работы генератора развертки.
1) Автоколебательная периодическая развертка – работает постоянно, вырабатывает пилообразное напряжение.
2) Ждущая развертка – запускается при наличии сигнала.
3) Однократная развертка.
Цифровой частотомер.
В схеме частотомера подсчитывается число импульсов ![]() , соответствующее числу периодов неизвестной частоты
, соответствующее числу периодов неизвестной частоты ![]() за известные высокоточные интервалы времени, называемые временим измерения.
за известные высокоточные интервалы времени, называемые временим измерения. ![]() .
.
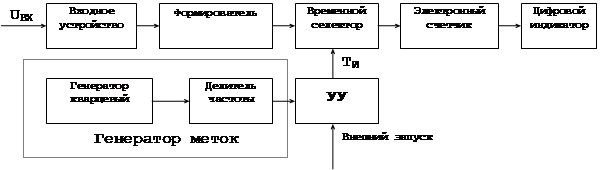
Входное устройство состоит из широкополосного усилителя и аттенюатора, которые служат для согласования частотомера с источником сигнала.
Формирователь преобразует входной сигнал в последовательность импульсов большой амплитуды с большой крутизной фронтов, частота следования которых равна частоте измеряемого сигнала.
Временной селектор – фактически, это электронный ключ с двумя входами, который открывается стробирующим импульсом, вырабатываемым устройством управления, на высокоточное время измерений и пропускает эти импульсы на электронный счетчик. Цифровой индикатор выдает результаты измерения в герцах.
Генератор меток времени состоит из кварцевого генератора и делителя частоты. Кварцевый генератор – высокоточный генератор, который может вырабатывать импульсы частотой 1 МГц. Делитель частоты делит частоту кварцевого генератора декадными ступенями до 0.01 Гц.
УУ обеспечивает регулируемое время индикации на цифровом индикаторе, сброс с четных декад и др. схем в ноль перед каждым измерением, а также обеспечивает режим ручного, автоматического и внешнего запуска.
Электронный счетчик состоит из нескольких, последовательно соединенных счетных декад.
Основной особенностью частотомера является увеличение погрешности измерения при уменьшении частоты.
![]() .
.
Измерения периодов .
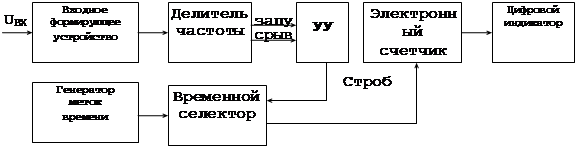
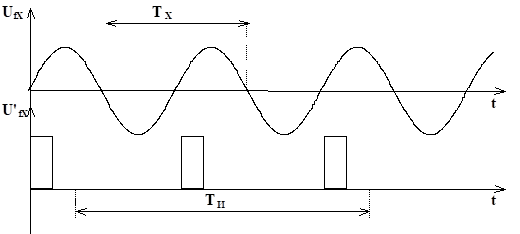
Входной сигнал через входное формирующее устройство и делитель частоты поступает на УУ, формирующее стробирующий импульс, длительность которого равна периоду измеряемого сигнала. На вход электронного счетчика поступают импульсы с генератора меток времени.
Электронно-лучевые осциллографы.
Электронно-лучевые осциллографы – приборы, предназначенные для визуального наблюдения форм исследуемых электрических сигналов. Кроме того, осциллографы могут применяться для измерения частоты, периода и амплитуды.
Основная деталь электронного осциллографа - электронно-лучевая трубка (смотри рисунок), напоминающая по форме телевизионный кинескоп.
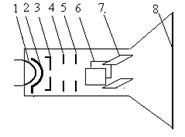 Экран трубки (8) покрыт изнутри люминофором - веществом, способным светиться под ударами электронов. Чем больше поток электронов, тем ярче свечение той части экрана, куда они попадают. Испускаются же электроны так называемой электронной пушкой, размещенной на противоположном от экрана конце трубки. Она состоит из подогревателя (нити накала) (1) и катода (2). Между “пушкой” и экраном размещены модулятор (3), регулирующий поток летящих к экрану электронов, два анода (4 и5), создающих нужное ускорение пучку электронов и его фокусировку, и две пары пластин, с помощью которых электроны можно отклонять по горизонтальной Y (6) и вертикальной X (7) осям.
Экран трубки (8) покрыт изнутри люминофором - веществом, способным светиться под ударами электронов. Чем больше поток электронов, тем ярче свечение той части экрана, куда они попадают. Испускаются же электроны так называемой электронной пушкой, размещенной на противоположном от экрана конце трубки. Она состоит из подогревателя (нити накала) (1) и катода (2). Между “пушкой” и экраном размещены модулятор (3), регулирующий поток летящих к экрану электронов, два анода (4 и5), создающих нужное ускорение пучку электронов и его фокусировку, и две пары пластин, с помощью которых электроны можно отклонять по горизонтальной Y (6) и вертикальной X (7) осям.
Работает электроннолучевая трубка следующим образом:
На нить накала подают переменное напряжение, на модулятор постоянное, отрицательной полярности по отношению к катоду на аноды - положительное, причем на первом аноде (фокусирующем) напряжение значительно меньше, чем на втором (ускоряющем). На отклоняющие пластины подается как постоянное напряжение, позволяющее смещать пучок электронов в любую сторону, относительно центра экрана, так и переменное, создающее линию развертки той или иной длины (пластины Пх), а также ”рисующей” на экране форму исследуемых колебаний (пластины Пу).
Чтобы представить, как получается на экране изображение, экран трубки представим в виде окружности (хотя у трубки он может быть и прямоугольный) и поместим внутри нее отклоняющие пластины (см. рисунок). Если подвести к горизонтальным пластинам Пх пилообразное напряжение, на экране появится светящаяся горизонтальная линия - ее называют линией развертки или просто разверткой. Длина ее зависит от амплитуды пилообразного напряжения.
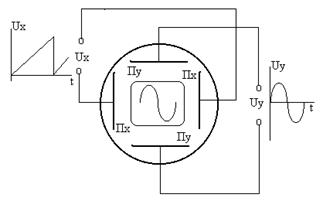 Если теперь одновременно с пилообразным напряжением, поданным на пластины Пх, подать на другую пару пластин (вертикальных - Пу), например, переменное напряжение синусоидальной формы, линия развертки в точности “изогнется” по форме колебаний и “нарисует” на экране изображение.
Если теперь одновременно с пилообразным напряжением, поданным на пластины Пх, подать на другую пару пластин (вертикальных - Пу), например, переменное напряжение синусоидальной формы, линия развертки в точности “изогнется” по форме колебаний и “нарисует” на экране изображение.
В случае равенства периодов синусоидального и пилообразного колебаний, на экране будет изображение одного периода синусоиды. При неравенстве же периодов на экране появится столько полных колебаний, сколько периодов их укладывается в периоде колебаний пилообразного напряжения развертки. В осциллографе имеется регулировка частоты развертки, с помощью которой добиваются нужного числа наблюдаемых на экране колебаний исследуемого сигнала.
Структурная схема осциллографа.
На рисунке изображена структурная схема осциллографа. На сегодняшний день существует большое число различных по конструкции и назначению осциллографов. По-разному выглядят их лицевые панели (панели управления), несколько отличаются названия ручек управления и переключатели. Но в любом осциллографе существует минимально необходимый набор узлов, без которых он не может работать. Рассмотрим назначение этих основных узлов. На примере осциллографа С 1-68.
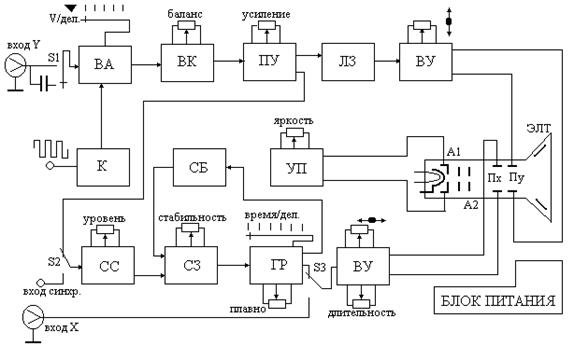
На рисунке:
ВА- входной аттенюатор; ВК- входной каскад усилителя; ПУ- предварительный усилитель; ЛЗ- линия задержки; ВУ- выходной усилитель; К- калибратор; СБ- схема блокировки; УП- усилитель подсвета; СС- схема синхронизации; ГР- генератор развертки; ЭЛТ- электроннолучевая трубка.
Схема работает следующим образом.
Блок питания
Блок питания обеспечивает энергией работу всех узлов электронного осциллографа. На вход блока питания поступает переменное напряжение, как правило, величиной 220 В. В нем оно преобразуется в напряжения разной величины: переменное 6,3 В для питания нити накала электронно-лучевой трубки, постоянное напряжение 12-24 В для питания усилителей и генератора, около 150 В для питания оконечных усилителей горизонтального и вертикального отклонения луча, несколько сотен вольт для фокусировки электронного луча и несколько тысяч вольт для ускорения электронного пучка.
Из блока питания кроме выключателя питания, выведены на переднюю панель осциллографа регуляторы: “ФОКУСИРОВКА” и “ЯРКОСТЬ” При вращении этих ручек изменяются напряжения, подаваемые на первый анод и модулятор. При изменении напряжения на первом аноде, меняется конфигурация электростатического поля, что приводит к изменению ширины электронного луча. При изменении напряжения на модуляторе изменяется ток электронного луча (изменяется кинетическая энергия электронов), что приводит к изменению яркости свечения люминофора экрана.
Генератор развертки
Выдает пилообразное напряжение, частоту которого можно изменять грубо (ступенями) и плавно. На лицевой панели осциллографа они называются “ЧАСТОТА ГРУБО” (или “ДЛИТЕЛЬНОСТЬ РАЗВЕРТКИ”) и “ЧАСТОТА ПЛАВНО”. Диапазон частот генератора весьма широк - от единиц герц до единиц мегагерц. Около переключателя диапазонов проставлены значения длительности (продолжительности) пилообразных колебаний.
Усилитель канала горизонтального отклонения
С генератора развертки сигнал подается на усилитель канала горизонтального отклонения (канала X). Этот усилитель необходим для получения такой амплитуды пилообразного напряжения, при которой электронный луч отклоняется на весь экран. В усилителе расположены регулятор длины линии развертки, на передней панели осциллографа он называется “УСИЛЕНИЕ X“ или “ АМПЛИТУДА X”, и регулятор смещения лини развертки по горизонтали.
Канал вертикальной развертки
Состоит из входного аттенюатора (делителя входного сигнала) и двух усилителей - предварительного и оконечного. Аттенюатор позволяет выбирать нужную амплитуду рассматриваемого изображения в зависимости от амплитуды исследуемых колебаний. С помощью переключателя входного аттенюатора, амплитуду сигнала можно уменьшить. Более плавные изменения уровня сигнала, а значит и размера изображения на экране, получают с помощью регулятора чувствительности оконечного усилителя канала Y. В оконечном усилителе этого канала, как и канала горизонтального отклонения, есть регулировка смещения луча, а значит, и изображения, по вертикали.
Кроме того, на входе канала вертикального отклонения стоит переключатель 1, с помощью которого можно либо подавать на усилитель постоянную составляющую исследуемого сигнала, либо избавляться от нее включением разделительного конденсатора. Это в свою очередь, позволяет пользоваться осциллографом как вольтметром постоянного тока, способным измерять постоянные напряжения. Причем входное сопротивление канала Y достаточно высокое - более 1 МОм.
О ДРУГИХ РЕГУЛИРОВКАХ
У генератора развертки есть еще один переключатель - переключатель режима работы развертки. Он также выведен на переднюю панель осциллографа (на структурной схеме он не указан). Генератор разверток может работать в двух режимах: в автоматическом - генерирует пилообразное напряжение заданной длительности и в ждущем режиме - “ожидает” прихода входного сигнала, и с его появлением запускается. Этот режим бывает необходим при исследовании сигналов появляющихся случайно, либо при исследовании параметров импульса, когда его передний фронт должен быть в начале развертки. В автоматическом режиме работы случайный сигнал может появиться в любом месте развертки, что усложняет его наблюдение. Ждущий режим целесообразно применять во время импульсных измерений.
Синхронизация
Если между генератором развертки и сигналом нет никакой связи, то начинаться развертка и появляться сигнал будут в разное время, изображение сигнала на экране осциллографа будет перемещаться либо в одну, либо в другую сторону - в зависимости от разности частот сигнала и развертки. Чтобы остановить изображение нужно “засинхронизировать” генератор, т.е. обеспечить такой режим работы, при котором начало развертки, будет совпадать с началом появления периодического сигнала на входе Y (скажем синусоидального). Причем синхронизировать генератор можно как от внутреннего сигнала (он берется с усилителя вертикального отклонения), так и от внешнего, подаваемого на гнезда “ВXОД СИНXР.”. Выбирают тот или иной режим переключателем S2 - ВНУТР.- ВНЕШН. синхронизация (на структурной схеме переключатель находится в положении “внутренняя синхронизация).
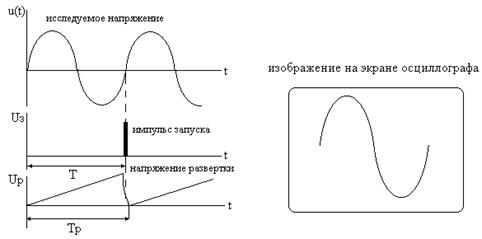
Принцип синхронизации поясняет следующая диаграмма.
Для наблюдения высокочастотных сигналов, когда их частота во много раз превышает принципиально возможную частоту каналов усиления осциллографа, применяют стробоскопические осциллографы.
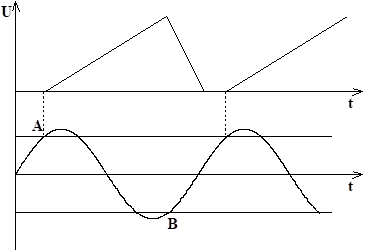
Принцип работы стробоскопического осциллографа поясняет следующая диаграмма.
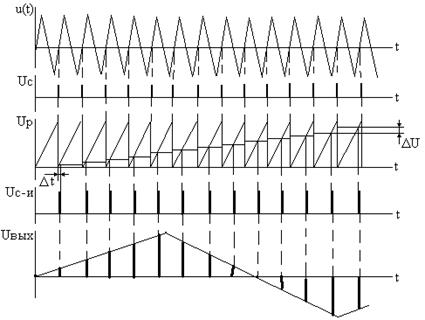
Осциллограф работает следующим образом: Каждый период исследуемого напряжения u(t) формируется синхронизирующий импульс Uc, который запускает генератор развертки. Генератор развертки формирует напряжение пилообразной формы, которое сравнивается со ступенчато - нарастающим (на ![]() U) напряжением (см. диаграмму). В момент равенства напряжений формируется строб – импульс, причем каждый последующий период строб – импульса увеличивается по отношению к предыдущему на величину
U) напряжением (см. диаграмму). В момент равенства напряжений формируется строб – импульс, причем каждый последующий период строб – импульса увеличивается по отношению к предыдущему на величину ![]() t. В момент прихода строб – импульса формируется импульс выборки. Его амплитуда равна амплитуде исследуемого сигнала и выводится на экран осциллографа. Таким образом, на экране получается изображение в виде импульсов, амплитудная огибающая которых, соответствует исследуемому сигналу только “растянутому” во времени. Стробоскопические осциллографы применяются в телевизионной, радиолокационной и других видах высокочастотной техники.
t. В момент прихода строб – импульса формируется импульс выборки. Его амплитуда равна амплитуде исследуемого сигнала и выводится на экран осциллографа. Таким образом, на экране получается изображение в виде импульсов, амплитудная огибающая которых, соответствует исследуемому сигналу только “растянутому” во времени. Стробоскопические осциллографы применяются в телевизионной, радиолокационной и других видах высокочастотной техники.
Погрешности осциллографов.
У осциллографов, при измерении напряжений, выделяют следующие погрешности:
- Погрешность номинального коэффициента отклонения по вертикали
 К0.
К0. - Погрешность преобразования, вызванная неравномерностью переходной характеристики Н. ; Визуальная погрешность.
Применение осциллографов.
1. Измерение амплитуды исследуемого сигнала.
Измерение амплитуды исследуемого сигнала может быть произведено следующими методами:
Измерение амплитуды методом калиброванной шкалы. Метод основан на измерении линейных размеров изображения непосредственно по шкале экрана ЭЛТ. Измеряемая амплитуда Um определяется как Um = Koh. Ко - коэффициент отклонения по вертикали.
Измерение амплитуды методом замещения. Метод основан на замещении измеряемой части сигнала калиброванным напряжением. (Метод рекомендуется применять при измерении малых напряжений).
Измерение амплитуды методом противопоставления. Метод заключается в том, что в дифференциальном усилителе входного канала Y исследуемый сигнал компенсируется калиброванным. Метод обеспечивает высокую точность при измерении малых сигналов.
2. Измерение временных интервалов.
Измерение временных интервалов методом калиброванной шкалы. Метод основан на измерении линейных размеров периода изображения по оси Х непосредственно по шкале экрана ЭЛТ. Измеряемое время tx определяется как tx =KplMp. Кp - коэффициент развертки, Мр- мсштаб развертки по оси Х, l- длина периода изображения на экране ЭЛТ.
Измерение временных интервалов с помощью калибрационных меток. Метод основан на создании в кривой исследуемого сигнала яркостных меток образцовой частоты. Это достигается подачей на модулятор ЭЛТ (вход Z) сигнала с измерительного генератора.
Измерение временных интервалов с помощью задержанной развертки. Метод основан на смещении изображения вдоль линии развертки относительно выбранной неподвижной точки (линии шкалы). Отсчет производится по регулировочной шкале “задержка”.
Иформационно-измерительные системы
Иформационно-измерительные системы (ИИС) можно разделить на следующие группы:
1. Измерительные.
2. Автоматического контроля.
3. Технической диагностики.
4. Идентификации (распознавания образов).
Любая ИИС имеет сложную структуру и включает в себя много устройств различного назначения – датчики, контроллеры, измерительные преобразователи и т.д. Для того чтобы эти устройства могли функционировать совместно они должны иметь общий стандартный интерфейс. Чаще других применяют приборные стандартные интерфейсы IEEE-448 и HP-IP (ГОСТ 26.003-80). Эти интерфейсы ориентированы на сопряжение устройств, располагаемых на расстоянии 20 м, и позволяют иметь в системе до 15 приборов.
Все приборы, входящие в состав ИИС можно разделить на 4 группы:
Группа А- осуществляет функции приема, передачи данных и управления объектом.
Группа В- осуществляет функции приема и передачи данных.
Группа С- осуществляет функции только передачи данных.
Группа D- осуществляет функции только приема данных.
Структура, включающая в себя приборы всех групп, объединенных общей шиной показана на рисунке.
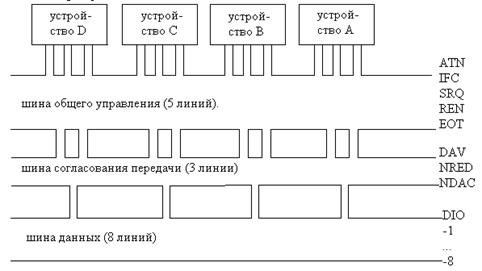
Расшифровка сигналов:
Шина данных DIO- предназначена для передачи информации.
Шина согласования.
DAV- линия сопряжения данных.
NRED- линия готовности к приему.
NDAC- сигнал данные приняты.
Шина общего управления.
Линия ATN- управления для команды посланной контроллером).
Линия IFC- очистка интерфейса.
Линия SRQ- запрос на обслуживание.
Линия REN- разрешено дистанционное управление. (Приводит все схемы в нормальное состояние).
Линия EOT- конец обработки, конец идентификации. (Посылка команды указывающий на окончание передачи сообщений по шине данных).
Одна из работающих в области физических исследований информационно-измерительных систем получила название KAMAC (КАМАК).
Система КАМАК.
Основные структуры системы
Основой системы КАМАК является крейт с 25 ячейками (станциями), в которые по направляющим вставляются модули, включая контроллер. Модуль может занимать одну или несколько ячеек. Обмен данными между модулями происходит по внутренним шинам крейта - горизонтальной магистрали и организуется контроллером. Существует несколько конфигураций системы, обусловленных выбранным способом управления крейтом и организацией его связи с управляющей ЭВМ.
Возможны два основных варианта ее реализации системы. Первый - на основе программируемого управления крейтом с использованием простого ориентированного на пользователя языка для организации часто проводимых операций, таких как, например периодический опрос содержимого счетчиков импульсов и передача результатов счета в память. Второй вариант автономной системы базируется на управлении крейтом программируемым компьютером, который встраивают в контроллер крейта (микропроцессорный контроллер) или в качестве вспомогательного контроллера размещают в одной из ячеек крейта и связывают со стандартным контроллером крейта дополнительной магистралью.
Непосредственное управление от компьютера в этом случае не предусмотрено, однако допускается обмен с внешней ЭВМ - передача ей сжатых данных измерений и прием системной информации для управления.
Система с вертикальной магистралью.
Обмен информацией между несколькими крейтами (максимально до семи) и компьютером может осуществляться через так называемую вертикальную магистраль с параллельной передачей данных. Подобная структура из-за больших затрат на организацию кабельной магистрали с параллельными линиями оказывается целесообразной для средних и больших пространственно ограниченных систем. Скорость передачи данных в магистрали может превышать 107 бит/с. При определенных условиях к компьютеру может быть присоединено несколько вертикальных магистралей.
Основные схемы реализации таких систем показаны на рисунках.
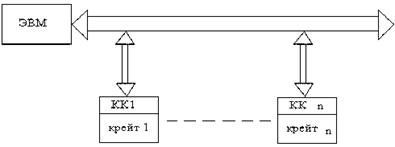
КК- контроллер крейта.
Схема радиальной структуры системы. Позволяет объединить до 4-х крейтов.
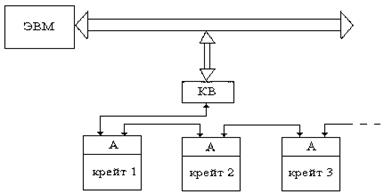
КВ- контроллер ветви.
Магистральный тип системы. Подключение крейтов осуществляется через контроллеры А к единственному контроллеру ветви КВ.
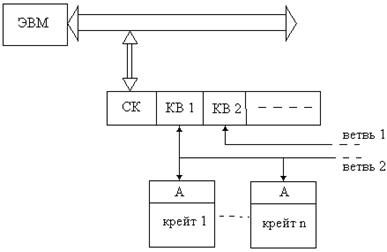
СК- системный крейт.
Радиально-магистральный тип системы. Специальные системные контроллеры СК подключаются радиально. Они позволяют подсоединить реализованные в виде КАМАК контроллеры ветви КВ.
Пространственно-распеделенная система.
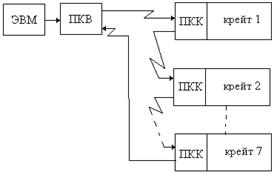
Для систем, элементы которых удалены друг от друга на значительные расстояния, используется канал с последовательной передачей данных между компьютером и крейтами. Канал представляет собой однонаправленную замкнутую цепь (кольцевую магистраль), в которую последовательно друг за другом включают до 62 крейтов. Двоичные данные передаются поразрядно или пословно (побайтно) со скоростью, обусловленной характеристиками каналов связи. Так, например, при использовании телефонных линий связи скорость передачи оказывается существенно меньше в сравнении с параллельной передачей данных в вертикальной магистрали.
Структура системы с последовательной организацией связей показана на рисунке.
Обозначения:
ПКВ- последовательный контроллер ветви.
ПКК- последовательный контроллер крейта.
Структура команд КАМАК.
Командное слово согласно ГОСТу 26.201-80 выглядит следующим образом.

Модульный принцип построения обеспечивает возможность создания агрегатных комплексов.
Конструктивная однородность системы достигается путем унификации.
Магистральная структура информационных связей между функциональными блоками достигается за счет использования машинно-независимой магистрали крейта.
Широкое применение программного управления обеспечивает гибкость реализуемых системой алгоритмов.
В настоящее время разработано более 200 блоков различного назначения.
Технические характеристики системы:
Число каналов – 32.
Максимальный уровень коммутируемого сигнала – 10 В.
Минимальная частота переключений – 50*103 перекл/сек.
Рабочая частота – более 15 МГц.
Интерфейс телетайпа предназначен для передачи данных в двух направлениях и работает по коду ASC-II.
Число разрядов слова телетайпа – 8 (DOS).
Цифровые вольтметры и амперметры.
Основным узлом цифровых приборов являются цифро-аналоговые (ЦАП) и аналогово-цифровые (АЦП) преобразователи. Эти устройства подробно рассматриваются в курсе промышленной электроники, поэтому в данных лекциях они будут рассмотрены вкратце и только те разделы, которые касаются непосредственно измерений.
Аналогово-цифровые преобразователи.
АЦП, как правило, устанавливается на входе прибора и преобразует аналоговый входной сигнал в цифровой код. По мере изменения сигнала, изменяется и цифровой код на выходе АЦП. Темп обновления кода определяется интервалом дискредитации ![]() t. Чем меньше интервал дискредитации, тем больше цифровых слов будет соответствовать данному входному аналоговому сигналу и больше нужно будет ячеек памяти для хранения этой информации. Принцип аналогово-цифрового преобразования показан на рисунке.
t. Чем меньше интервал дискредитации, тем больше цифровых слов будет соответствовать данному входному аналоговому сигналу и больше нужно будет ячеек памяти для хранения этой информации. Принцип аналогово-цифрового преобразования показан на рисунке.
Выбор интервала дискредитации осуществляется в соответствии с теоремой Котельникова:
![]() .
.
Промышленностью выпускаются АЦП допускающие возможность реализации различных цифровых двоичных кодов. В измерительной технике используются, в основном, следующие из них:
1. Прямой код.
2. Смещенный код.
3. Дополнительный код.
4. Обратный код.
Цифровым кодом называют последовательность цифр, подчиняющуюся определенному закону. В измерительной технике применяют в основном устройства с двумя устойчивыми состояниями. Поэтому будут рассмотрены только двоичные коды.
Любая система счисления основана на представлении числа в виде суммы:
![]() ,
,
где: n- число разрядов, к- коэффициент, р- основание системы, равное числу используемых в системе знаков.
Прямой код описывается приведенным выше уравнением и предусматривает введение знака. Это либо старший разряд, либо отдельный вход. Знаку (+) соответствует логическая 1, а знаку (-) - логический 0.
Смещенный код образуется прибавлением к числу постоянной величины 2n. Тогда:
![]() .
.
Достоинство этого кода состоит в его легкой реализации на однополярных АЦП и ЦАП.
Дополнительный код образуется вычитанием в двоичной форме преобразуемого целого числа Сj из постоянной величины 2n-1. Тогда после преобразования получим:
![]() ,
,
где: 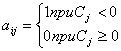 .
.
Обратный код образуется вычитанием в двоичной форме преобразуемого числа Сj из постоянной величины (2n+1-1). Тогда после преобразования имеем:
![]() .
.
Рассмотрим конкретную реализацию АЦП и ЦАП.
Преобразование аналоговой величины в цифровой код является метрологической процедурой и выполняется путем сравнения измеряемой величины с набором дискретных эталонных величин, имеющих одинаковую природу с преобразуемой. В схеме происходит замена аналоговой величины на большую дискретную.
Существует несколько алгоритмов преобразования и схем их реализующих.
Метод последовательного счета.
Метод подробно показан на рисунке.
![]() .
.
Хо- дискрета преобразования. Если обозначить n- число квантов необходимых для достижения значения Х, тогда Х=nХо+![]() .
.
При Хо=1 число n является единичным кодом.
![]() - погрешность преобразования.
- погрешность преобразования.
Достоинством этого метода являются простота и высокая статическая точность. Недостаток – малое быстродействие.
Область применения – простейшие цифровые вольтметры.
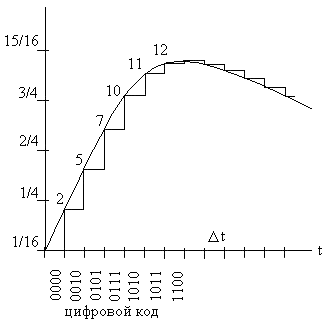
Метод поразрядного уравновешивания.
Алгоритм преобразования можно убыстрить, если оперировать набором разновеликих квантов
Принцип пошагового достижения измеряемой величины показан на рисунке.
Данный алгоритм позволяет осуществить до 106 преобразований в секунду и является самым распространенным при реализации АЦП в цифровых системах и ЭВМ.
Метод одновременного считывания.
Метод основан на применении стохастических алгоритмов. Устройство их реализующее, представлено на рисунке. Оно работает следующим образом: Входной сигнал Х сравнивается одновременно со многими нормированными источниками ЕДС. Далее происходит анализ погрешности ![]() возникшей в результате сравнения. Компаратор (устройство сравнения) на выходе которого погрешность наименьшая включает цифровое устройство с соответствующим цифровым кодом на выходе (см. рисунок и диаграмму).
возникшей в результате сравнения. Компаратор (устройство сравнения) на выходе которого погрешность наименьшая включает цифровое устройство с соответствующим цифровым кодом на выходе (см. рисунок и диаграмму).
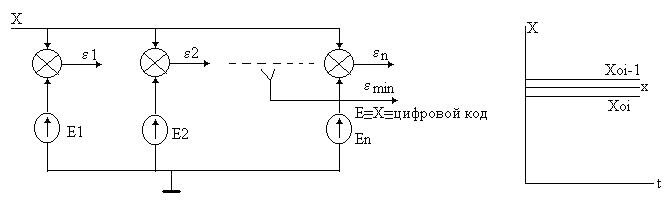
Данный алгоритм позволяет реализовывать преобразование на частотах до 200 МГц.
Цифро-аналоговые преобразователи.
Цифро-аналоговые преобразователи (ЦАП) выпускаются в различном исполнении. Рассмотрим наиболее распространенные из них.
ЦАП с весовой резистивной матрицей.
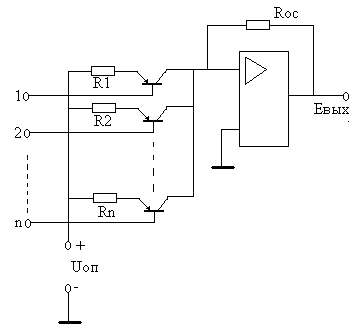
Uоп- источник образцового опорного напряжения.
Цифровой сигнал, подаваемый на n- разрядный вход изменяет коэффициент усиления и, тем самым, изменяет напряжение на выходе.
Второй тип ЦАП – с цепной R-2R матрицей.
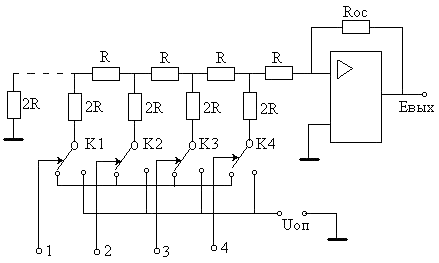
Если число разрядов равно N, тогда ЦАП имеет 2N выходного сигнала, 2N-1 значений входного сигнала. Параметр, который называется разрешающая способность (весовое значение каждого разряда), определяется как (2N-1)-1. В качестве примера определим разрешающую способность двенадцати разрядного ЦАП, если максимальное выходное напряжение равно10 вольт.
N=12, Umax=10. Абсолютная разрешающая способность составит:
![]() .
.
Цифровые приборы различают по способу преобразования измеряемого сигнала. В основном различают три вида преобразования:
1. Кодо-импульсное преобразование.
2. Время-импульсное преобразование.
3. Частотно-импульсное преобразование.
В приборах кодо-импульсным преобразованием происходит последовательное сравнение значений измеряемой величины с рядом дискретных значений известной величины, изменяющийся по определенному закону.
В приборах с время-импульсным преобразованием измеряемая величина Ux преобразуется во временной интервал ![]() t с последующим заполнением этого интервала импульсами N образцовой частоты.
t с последующим заполнением этого интервала импульсами N образцовой частоты.
В приборах с частотно-импульсным преобразованием (интегрирующих) измеряемое напряжение Ux преобразуется в частоту f следования импульсов, которые подсчитываются за определенный интервал времени.
Рассмотрим конкретные структуры приборов.
Структурная схема и диаграмма, поясняющая работу прибора с время-импульсным преобразованием, показаны на рисунке.
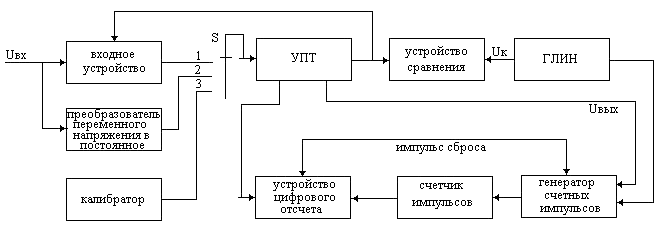
УПТ- усилитель постоянного тока, ГЛИН- генератор линейно изменяющегося напряжения.
(Генератор счетных импульсов также формирует импульс сброса).
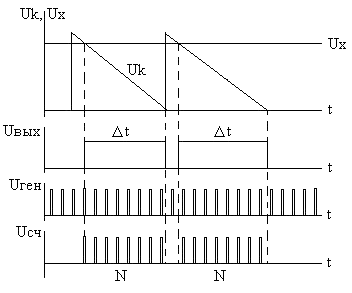
Прибор работает следующим образом: Генератор пилообразного напряжения ГЛИН вырабатывает напряжение (на рисунке обозначено Uk) с нормированной частотой. В устройстве сравнения напряжение Uk сравнивается с измеряемым напряжением Ux. В моменты совпадения напряжений формируются (см. диаграмму) импульсы ![]() t, определяющие интервалы времени, за которые будет производится измерение. Далее эти интервалы “заполняются’ импульсами с генератора счетных импульсов. Количество импульсов N за интервал времени
t, определяющие интервалы времени, за которые будет производится измерение. Далее эти интервалы “заполняются’ импульсами с генератора счетных импульсов. Количество импульсов N за интервал времени ![]() t подсчитывается счетчиком импульсов и отображается в отсчетном устройстве. Таким образом, чем больше измеряемое напряжение, тем больше интервал времени
t подсчитывается счетчиком импульсов и отображается в отсчетном устройстве. Таким образом, чем больше измеряемое напряжение, тем больше интервал времени ![]() t и количество импульсов N. (Число импульсов N прямо пропорционально напряжению Ux).
t и количество импульсов N. (Число импульсов N прямо пропорционально напряжению Ux).
Измеряемая величина равна:
 .
.
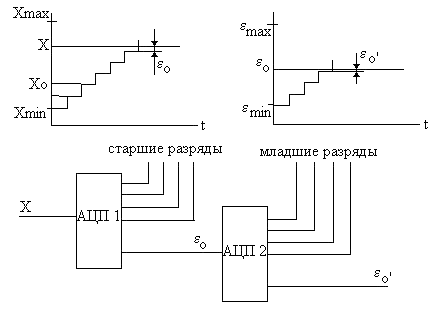
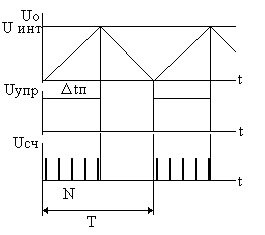
Схема и диаграмма, поясняющая работу приборов с частотно-импульсным преобразованием, показаны на рисунке.
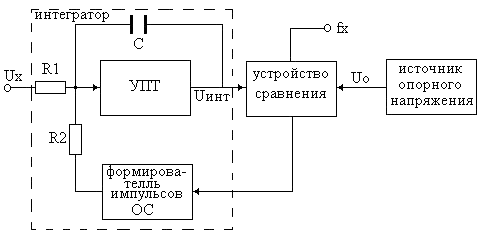
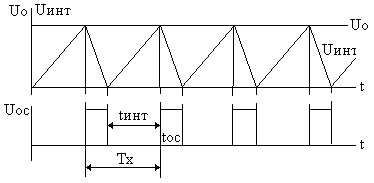
Схема работает следующим образом: При подаче на вход интегратора напряжения Uх на его выходе формируется линейно нарастающее напряжение. Скорость нарастания сигнала Uинт , зависит от величины входного напряжения, чем больше напряжение, тем с большей скоростью нарастает сигнал. В устройстве сравнения напряжение Uинт сравнивается с образцовым напряжением Uo. В момент равенства напряжений формируется импульс обратной связи, который запускает схему сброса интегратора и действует до тех пор, пока напряжение на выходе интегратора не обнулится. Очевидно, чем больше входное напряжение, тем больше частота следования импульсов. Частота импульсов fx прямо пропорциональна входному напряжению. В приведенной схеме не контролируется процесс разряда интегратора, что приводит к погрешности преобразования Ux – fx.
Для повышения точности измерения применяют схемы с двойным интегрированием, в которых разряд интегратора также нормируется. Процесс заряда и разряда, противоположны по знаку и подчиняются следующему выражению:
 .
.
Диаграмма, поясняющая работу прибора с двойным интегрированием, приведена на рисунке:
Поможем написать любую работу на аналогичную тему