Колебания могут складываться и при этом усиливать или гасить друг друга, или изменять траекторию движения тела. Рассмотрим сложение колебаний, совершаемых в одном направлении. Пусть осциллятор совершает два одновременных колебания в одном направлении и одинаковой частоты ω0:
x1=A1cos(ω0t+a1) и x2=A2cos(ω0t+a2).
При этом суммарное колебание координаты x(t) равно x = x1 + x2. 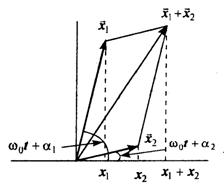 Представим колебания x1 и x2 в виде векторов на плоскости (рис.), модулями которых являются амплитуды колебаний, а фазы колебаний будут служить углами наклона векторов к оси x. При изменении времени векторы x1 и x2, будут равномерно вращаться в плоскости рисунка, однако разность фаз между колебаниями остается неизменной. Из рисунка видно, что вектор x = x1 + x2, представляет собой сумму колебаний x1 и x2. В самом деле, проекции векторов x1, и x2, на ось x соответственно равны A1cos(ω0t+a1) и А2cos(ω0t+a2), а проекция вектора x равна сумме этих проекций. Результирующее колебание также можно записать в виде: x(t)=x1+x2= = Acos(ω0t+a). Частота результирующего колебания равна частоте складываемых колебаний, т. е. результирующее колебание также гармоническое. Амплитуду результирующего колебания нетрудно найти из рис.
Представим колебания x1 и x2 в виде векторов на плоскости (рис.), модулями которых являются амплитуды колебаний, а фазы колебаний будут служить углами наклона векторов к оси x. При изменении времени векторы x1 и x2, будут равномерно вращаться в плоскости рисунка, однако разность фаз между колебаниями остается неизменной. Из рисунка видно, что вектор x = x1 + x2, представляет собой сумму колебаний x1 и x2. В самом деле, проекции векторов x1, и x2, на ось x соответственно равны A1cos(ω0t+a1) и А2cos(ω0t+a2), а проекция вектора x равна сумме этих проекций. Результирующее колебание также можно записать в виде: x(t)=x1+x2= = Acos(ω0t+a). Частота результирующего колебания равна частоте складываемых колебаний, т. е. результирующее колебание также гармоническое. Амплитуду результирующего колебания нетрудно найти из рис.
![]() , (3.15)
, (3.15)
а новую начальную фазу определить так:
 . (3.16)
. (3.16)
Из формулы (3.15) следует, что амплитуда результирующего колебания существенно зависит от значения разности фаз начальных колебаний. Если разность фаз a1–a2=0, колебания находятся в фазе, и амплитуды A1 и A2 складываются A = A1 + A2. Если же разность фаз равна ±p, колебания находятся в противофазе, т.е. амплитуда результирующего колебания A = |A1 – A2|.
Выше было рассмотрено сложение двух колебаний с одинаковой частотой, при этом результирующее колебание осталось гармоническим с той же частотой. Если складываются колебания разной частоты, то векторы x1 и x2 в плоскости будут вращаться с разной скоростью (рис.). Тогда результирующий вектор в процессе вращения будет изменяться по величине и описывать сложное негармоническое колебание.
Рассмотрим сложение колебаний во взаимно перпендикулярных направлениях. Наиболее простым примером такого колебания являются одновременные колебания частицы в направлениях x и y, происходящие с одинаковыми частотами и амплитудами (см. формулы (3.11)). Как было установлено, результирующее движение представляет собой равномерное вращение в плоскости по окружности с радиусом, равным амплитудам колебаний величин x и y. В случае неравных амплитуд и частот элементарных колебаний результирующее движение может происходить по весьма сложным траекториям и не будет гармоническим.
Таким образом, сложение гармонических колебаний с различными частотами и амплитудами позволяет осуществить колебание произвольной формы. Это обстоятельство используется для создания негармонических колебаний необходимой формы. Отсюда следует и обратное утверждение: всякое сложное негармоническое колебание может быть представлено в виде суммы простых гармонических колебаний. Другими словами, движение сложной колебательной системы со многими степенями свободы можно описать, рассматривая соответствующий набор гармонических осцилляторов.
Свободные механические колебания могут существовать в системах, где сохраняется полная механическая энергия. В реальных системах всегда присутствует трение, благодаря которому свободные колебания, возбужденные первоначально в системе, со временем будут затухать. Кроме того, колебания в различных системах часто происходят под действием внешней силы — так называемой вынуждающей силы. Колебания при наличии сил трения являются затухающими, а под действием внешней силы — вынужденными.
Затухающие колебания.
Во всякой реальной колебательной системе имеются силы сопротивления, действие которых приводит к уменьшению энергии системы. Если убыль энергии не восполняется за счет работы внешних сил, колебания будут затухать. В простейшем, и вместе с тем наиболее часто встречающемся, случае сила сопротивления F* пропорциональна величине скорости:
![]() . (3.18)
. (3.18)
Здесь r — постоянная, называемая коэффициентом сопротивления. Знак минус обусловлен тем, что сила F* и скорость v имеют противоположные направления; следовательно, их проекции на ось x имеют разные знаки.
Уравнение второго закона Ньютона при наличии сил сопротивления имеет вид
![]() . (3.19)
. (3.19)
Применив обозначения
![]()
![]() (3.20)
(3.20)
ω0 ‑ представляет собой ту частоту, с которой совершались бы свободные колебания системы в отсутствие сопротивления среды (при r = 0). Эту частоту называют собственной частотой системы.
перепишем уравнение (3.19) следующим образом:
![]() . (3.21)
. (3.21)
Подстановка в (3.21) функции x=eλt приводит к характеристическому уравнению
![]() (3.22)
(3.22)
Корни этого уравнения равны
![]() ,
, ![]() . (3.23)
. (3.23)
При не слишком большом затухании (при β<ω0) подкоренное выражение будет отрицательным. Представим его в виде (iω)2, где ω — вещественная величина, равная
![]() . (3.24)
. (3.24)
Тогда корни характеристического уравнения запишутся следующим образом:
![]() ,
, ![]() . (3.25)
. (3.25)
Общим решением уравнения (58.1) будет функция
![]() .
.
Таким образом, при не слишком сильном затухании общее решение уравнения (3.21) имеет вид
![]() . (3.26)
. (3.26)
 Здесь a0
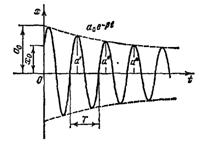
и α — произвольные постоянные, ω — величина, определяемая формулой (3.24). На рис. дан график функции (3.26). Пунктирными линиями показаны пределы, в которых находится смещение колеблющейся точки x.
Здесь a0
и α — произвольные постоянные, ω — величина, определяемая формулой (3.24). На рис. дан график функции (3.26). Пунктирными линиями показаны пределы, в которых находится смещение колеблющейся точки x.
В соответствии с видом функции (3.26) движение системы можно рассматривать как гармоническое колебание частоты ω с амплитудой, изменяющейся по закону a(t) = a0e‑β∙t. Верхняя из пунктирных кривых на рис. дает график функции a(t), причем величина a0 представляет собой амплитуду в начальный момент времени. Начальное смещение x0 зависит, кроме a0, также от начальной фазы α: x0 =a0∙cosα.
Скорость затухания колебаний определяется величиной β = r/2m, которую называют коэффициентом затухания. Найдем время τ, за которое амплитуда уменьшается в e раз. По определению e‑β∙τ = e‑1, откуда β∙τ = 1. Следовательно, коэффициент затухания обратен по величине тому промежутку времени, за который амплитуда уменьшается в e раз.
Согласно формуле (3.24) период затухающих колебаний равен
 . (3.27)
. (3.27)
При незначительном сопротивлении среды (![]() ) период колебаний практически равен T0
= 2π/ω0. С ростом коэффициента затухания период колебаний увеличивается.
) период колебаний практически равен T0
= 2π/ω0. С ростом коэффициента затухания период колебаний увеличивается.
Последующие наибольшие отклонения в какую-либо сторону (например, a', a'', a''' и т.д. на рис. образуют геометрическую прогрессию. Действительно, если a' =a0e‑β∙t, то a'' = a0e‑β(t+T) = a'e‑βT, a''' =a0e‑β(t+2T) =a''e‑βT и т. д. Вообще, отношение значений амплитуд, соответствующих моментам времени, отличающимся на период, равно
 .
.
Это отношение называют декрементом затухания, а его логарифм — логарифмическим декрементом затухания:
 (3.28)
(3.28)
(не путать с λ в формулах (3.23 ) и (3.25)!).
Для характеристики колебательной системы обычно используется логарифмический декремент затухания λ. Выразив в соответствии с (3.28) β через λ, и T, можно закон убывания амплитуды со временем записать в виде
![]() .
.
За время τ, за которое амплитуда уменьшается в е раз, система успевает совершить Ne
= τ/T колебаний. Из условия ![]() получается, что
получается, что ![]() . Следовательно, логарифмический декремент затухания обратен по величине числу колебаний, совершаемых за то время, за которое амплитуда уменьшается в e
раз.
. Следовательно, логарифмический декремент затухания обратен по величине числу колебаний, совершаемых за то время, за которое амплитуда уменьшается в e
раз.
Для характеристики колебательной системы часто употребляется также величина
![]() , (3.29)
, (3.29)
называемая добротностью колебательной системы. Как видно из ее определения, добротность пропорциональна числу колебаний Ne, совершаемых системой за то время τ, за которое амплитуда колебаний уменьшается в e раз.
Подстановка функции (58.7) и ее производной в выражение для полной энергии колеблющейся системы E=kx2/2 + mv2/2 приводит после преобразований к формуле
 , (3.30)
, (3.30)
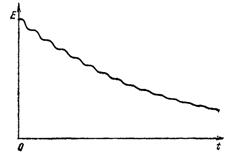 где y = arctg (β/ω). График этой функции изображен на рис. Убывание энергии обусловлено работой силы сопротивления среды
где y = arctg (β/ω). График этой функции изображен на рис. Убывание энергии обусловлено работой силы сопротивления среды ![]() . Мощность, развиваемая этой силой, равна
. Мощность, развиваемая этой силой, равна ![]() . Таким образом,
. Таким образом,
![]() .
.
Отсюда вытекает, что в тех точках кривой E(t), где ![]() , касательная к кривой параллельна оси t. В остальных точках dE/dt < 0.
, касательная к кривой параллельна оси t. В остальных точках dE/dt < 0.
При малом затухании (β<<ω0) слагаемым, содержащим синус, в формуле (3.30) можно пренебречь и считать, что энергия изменяется по закону
E = E0e‑2βt, (3.31)
где E0 = k(a0)2/2 — значение энергии в начальный момент. К тому же результату можно прийти, если заменить определяемое формулой (3.30) мгновенное значение E(t) его средним значением за времяот t—T/2 до t + T/2 (T — период колебаний), вычисленным в предположении, что множитель ехр (—2βt) в течение промежутка T остается постоянным.
Из формулы (3.27) следует, что с ростом коэффициента затухания период колебаний увеличивается. При β=ω0 период колебаний обращается в бесконечность, т. е. движение перестает быть периодическим.
При β>ω0 корни характеристического уравнения становятся вещественными (см. (3.25)) и решение дифференциального уравнения (3.21) оказывается равным сумме двух экспонент:
![]() .
.
Здесь C1 и C2 — вещественные постоянные, значения которых зависят от начальных условий (от x0 и v0).Следовательно, движение носит апериодический (непериодический) характер— выведенная из положения равновесия система возвращается в положение равновесия, не совершая колебаний.
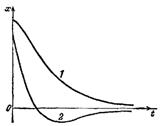 На рис.показано оба возможных способа возвращения системы к положению равновесия при апериодическом движении. Каким из этих способов приходит система в положение равновесия, зависит от начальных условий. Движение, изображаемое кривой 2, получается в том случае, когда система начинает двигаться из положения, характеризуемого смещением x0, к положению равновесия с начальной скоростью v0 определяемой условием
На рис.показано оба возможных способа возвращения системы к положению равновесия при апериодическом движении. Каким из этих способов приходит система в положение равновесия, зависит от начальных условий. Движение, изображаемое кривой 2, получается в том случае, когда система начинает двигаться из положения, характеризуемого смещением x0, к положению равновесия с начальной скоростью v0 определяемой условием
![]() . (3.32)
. (3.32)
Это условие будет выполнено в том случае, если выведенной из положения равновесия системе сообщить достаточно сильный толчок к положению равновесия. Если, отведя систему из положения равновесия, отпустить ее без толчка (т. е. с v0=0) или сообщить ей толчок недостаточной силы (такой, что v0 окажется меньше определяемой условием (3.32)), движение будет происходить в соответствии с кривой 1 на рис.
Поможем написать любую работу на аналогичную тему