Реостатный преобразователь – прецизионный реостат, движок которого перемещается под действием измерительной величины. Входной величиной преобразователя является линейное или угловое перемещение движка; выходной – изменение его сопротивления.
Устройство преобразования показано на рис.1
рис.1
Он состоит из каркаса 1, на котором намотан провод 2, изготовленный из материала с высоким удельным сопротивлением, и тока съемного двиэка 3, укрепленного на оси 4. 5 – выводы. Каркас с намоткой может иметь и переменное сечение (штриховая линия), тогда функция преобразования R=f(x) (х - перемещение) является нелинейной, или каркас может быть кольцевой, тогда R=f(α) (α– угловое перемещение).
При перемещении движка вдоль каркаса на величину шага обмотки ∆x=λ сопротивление изменяется на ∆R=(dR/dx)λ, где dR/dx – производная требуемой функции преобразования R=f(x) по перемещению движка. При перемещении движка с одного витка на другой сопротивление изменяется на величину, равную сопротивлению одного витка.
Потенциометрическая схема включения преобразователя показана на рис.2
рис.2
Если сопротивление нагрузки RH велико (RH>>RP), что током в нем можно пренебречь по сравнению с током в RP, то рассмотренный преобразователь работает в режиме холостого хода и напряжение на нагрузке
UH=UR/RP
пропорционально сопротивлению R.
Если преобразователь имеет пропорциональную функцию преобразования R=(RP/ℓ)x, то напряжение UH пропорционально перемещению движка
UH=(U/ℓ)x, (ℓ - перемещение)
Для анализа цепи с нагрузкой RH соизмеримой с RP можно воспользоваться теоремой об активном двухполюснике. Тогда
![]()
![]() UH =
UH =![]() ,
,
где β=R/RP – относительное изменение сопротивления преобразователя; α=RP/RH – коэффициент нагрузки. Зависимость UH от β для различных α приведена на рис.3.
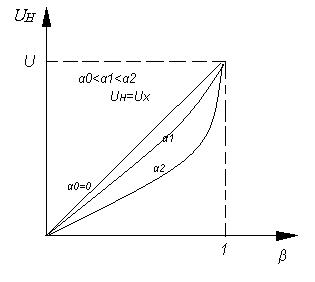 рис.3
рис.3
Для холостого хода UH=UX – прямая линия. Тогда погрешность ∆U=UH-UX. Для уменьшения погрешности следует увеличить RH.
С изменением температуры изменяется сопротивления преобразователя по формуле
Rt=Ro(1+αt),
где α – температурный коэффициент сопротивления;
Ro – сопротивление при t=0оС.
В режиме холостого хода температура не вызовет погрешность, а при RH≈RP– скажется температура.
Реостатному проволочному преобразователю присуща погрешность дискретными, т.е. скачкообразными изменениями сопротивления на ∆R при переходе движка с одного витка на другой. Тогда максимальное значение приведенной погрешности
γR=±∆R/2RP.
Если ∆R равны по всему диапазону, то
RP=n∆R
γR=±1/2n
где n – число витков в обмотке.
В практике применения корпус реостата крепится неподвижно, а движок – к измеряемой перемещение величине.
Длина перемещения x равна длине реостата ℓ и может иметь несколько десятков сантиметров.
Поможем написать любую работу на аналогичную тему