Индукционные преобразователи основаны на использовании явления электромагнитной индукции. Согласно этому закону, ЭДС в контуре определяется формулой е=-dФn/dt, где Ф – магнитный поток, n – число витков контура.
Таким образом, выходной величиной является ЭДС, а входной – скорость изменения потока.
В общем случае индукционный преобразователь представляет собой катушку с сердечником или без сердечника, находящуюся в магнитном поле. При изменении одного из параметров: катушки, сердечника, магнитного поля; в катушке наводится ЭДС.
Для катушки без сердечников уравнения для преобразования упрощаются и для основных видов преобразователей сводятся к следующим:
а) для неподвижной катушки в переменном магнитном поле (В=Вmcosωt)
e= ωnBmsinωt; б) для катушки, вращающейся с частотой Ω в постоянном магнитном поле с индукцией Во
e=Ω nSBosinωt,
где S- площадь катушки;
в) для контура, отдельные части которого линейно перемещаются в магнитном поле В, изменяя площадь потока, сцепленная с катушкой,
e=-dФ∕dt=-nBв(dx/dt),
где в и x- размеры катушки, x изменяется, т.к. часть катушки выходит из магнитного поля. dx/dt- линейная скорость перемещения или dα/dt- угловая скорость относительно магнитного потока.
г) для отрезка длиной L, движущегося в однородном магнитном поле со скоростью V так, что направления векторов L, B и V взаимно перпендикулярны,
e=VBL.
Индукционные преобразователи являются генераторными преобразователями и преобразуют механическую энергию в электрическую.
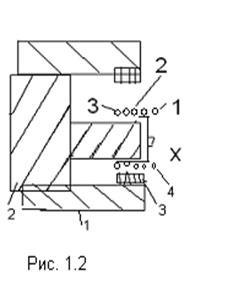 Различают ряд типов преобразователей. Преобразователь скорости вибрации (рис. 12)
Различают ряд типов преобразователей. Преобразователь скорости вибрации (рис. 12)
Преобразователь имеет кольцевой магнит 1, ярмо 2, магнитный поток замыкается через 2, 3 и воздушный зазор, в котором находится катушка 4, которая может перемещаться по направлению Х.
Катушку можно условно разделить на три части Ι-ΙΙΙ. Ι – находится вне магнитопровода, ΙΙ - находится в воздушном зазоре, где магнитный поток постоянен. Часть ΙΙΙ находится вне воздушного зазора, но внутри магнитной системы.
Магнитный поток здесь постоянен, но при вибрации изменяется число витков, изменяется потокосцепление и наводится ЭДС, пропорциональная скорости вибрации.
Тахометрические преобразователи. Примером их могут служить электромашинные генераторы. Частота ЭДС их определяется соотношением
f=np/60,
где n- частота вращения;
p- число пар полюсов.
На принципе работы индукционных преобразователей построено и ряд других датчиков: измерение числа импульсов, индукционные расходомеры, измерители индукции магнитных полей.
Погрешности индукционных преобразователей в значительной степени зависят от условий их работы (температура, внешние механические вибрации, внешнее магнитное поле) и от режима работы. Наибольшая погрешность возникает в режиме, при котором через нагрузку течет значительный ток, т.е. при конечных значениях сопротивления нагрузки. Наименьшая погрешность – в режиме холостого хода или когда нагрузкой являются электронные устройства с большим входным сопротивлением.
Поможем написать любую работу на аналогичную тему