Суть этого метода заключается и подборе такого положения движка калиброванного резистора R (см. рисунок 3.3), при котором падение напряжения Ur на левой (по схеме) части резистора R равно падению напряжения Ux на измеряемом заземлителе. При равенстве этих напряжений в индикаторе отсутствует ток. Порядок измерения сопротивления заземления этим методом следующий:
-создают схему измерения (см. рисунок 3.3);
-плавно изменяя положение движка и подбирая коэффициент трансформации, добиваются отсутствия тока в индикаторе;
-рассчитывают сопротивление заземления Rх:
Rx=R*n
где R - показание шкалы переменного резистора в момент компенсации, в Ом;
n - коэффициент трансформации.
На принципе компенсации основана работа измерителя сопротивлений типа М - 416.
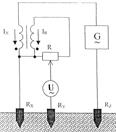
Рисунок 3.3 – Схема измерения сопротивления заземления методом компенсации
Поможем написать любую работу на аналогичную тему