Нелинейная модель, а точнее нелинеаризуемая форма основного уравнения эконометрической модели, создает существенные трудности при оценке значений ее параметров. Кроме того, некоторые проблемы в этом случае возникают и при определении характеристик качества построенных вариантов модели, включая и показатели точности найденных значений их параметров. В основном появление этих (и некоторых других) проблем обусловлено невозможностью получения решения задачи оценивания параметров в аналитическом виде, как это имело место а случае линейных эконометрических моделей.
Поясним происхождение этих проблем на примере двухфакторной нелинейной модели следующего вида:
![]()
Попытаемся использовать при определении оценок a0, a1, a2 ее параметров a0, a1, a2 метод наименьших квадратов при условии, что значения переменных уt, х1t и х2t, t=1, 2,..., Т известны. Сумма квадратов ненаблюдаемых значений ошибки еt, t=1, 2,..., Т; в данном случае может быть представлена в следующем виде:
![]()
![]()
В соответствии с выбранным критерием искомые значения оценок a0, a1, a2 должны удовлетворять условию минимума функции S2, что приводит к появлению трех уравнений: ![]()
![]() Учитывая, что S2
определено выражением (11.2), представим эти уравнения в виде следующей системы (аналога системы нормальных уравнений):
Учитывая, что S2
определено выражением (11.2), представим эти уравнения в виде следующей системы (аналога системы нормальных уравнений):
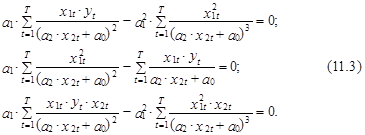
Несложно заметить, что уравнения системы (11.3) являются нелинейными относительно неизвестных значений a0, a1 и a2. При этом нелинейность в данном случае усугубляется необходимостью суммирования сложных функций, выраженных отношениями и квадратами зависимой и независимой переменных модели. Решение системы (11.3) можно получить, только используя достаточно сложные итеративные процедуры нахождения ее корней. При этом следует заметить, что для другой формы эконометрической зависимости, отличной от выражения (11.1) будет получена и другая, отличная от вида (11.3) система нелинейных уравнений. Для ее решения возможно придется применять и другую процедуру, учитывающую специфические особенности формы ее уравнений.
Процедура решения таких систем еще более усложняется, если в левой части эконометрической модели стоит не просто переменная уt, а некоторая ее функция g(уt, b), зависящая от некоторого набора параметров b1, b2, ..., bk. Примером такой функции является степенная g(уt, b)=![]() В этом случае заметим, что сумма квадратов ошибки эконометрической модели
В этом случае заметим, что сумма квадратов ошибки эконометрической модели
![]()
![]()
при произвольно выбранных значениях оценок ее параметров bk, k=0,1..., aj, j=0,1... может быть представлена в следующем виде:
![]()
где ft(a, x)=ft(a0, a1,..., x1t,..., xnt* ) – нелинейный относительно коэффициентов aj и возможно независимых переменных функционал, j=0,1,..., i=1,2,..., n; et – ошибка модели; a=(a0, a1,...); b=(b0, b1,...) – векторы оценок параметров модели (11.4); x – вектор значений независимых переменных, соответствующих значению уt.
В этом случае система нормальных уравнений, решениями которой являются “оптимальные” по МНК оценки, должна включать в себя и уравнения типа:
![]()
Аналогичные проблемы возникают и при получении оценок параметров нелинейных эконометрических моделей с использованием метода максимального правдоподобия. Заметим, что при использовании этого метода предполагаются известными тип закона распределения ошибки модели et и возможно некоторые его параметры (как правило, математическое ожидание равное нулю).
Как это было отмечено в главе II, обычно на практике закон распределения ошибки предполагается нормальным. В этом случае при обычном для нелинейных моделей предположении относительно независимости разновременных значений ошибки функция плотности наблюдаемой зависимой переменной уt в момент времени t может быть представлена в следующем виде:
![]()
![]()
где выражение
![]()
является якобианом преобразования; s2=se2 – дисперсия ошибки модели (11.4).
Как было отмечено в разделе 2.5, оптимальные оценки a параметров a модели (11.4) должны обеспечивать максимум логарифма функции правдоподобия, который в данном случае имеет следующий вид:
![]()
![]()
![]()
Уравнения максимального правдоподобия относительно неизвестных оценок параметров модели (11.4) и ее дисперсии s2 в данном случае имеют следующий вид:
![]()
![]()
![]()
![]()
Анализируя вид уравнений системы (11.9), можно сделать два вывода.
Во-первых, система уравнений максимального правдоподобия нелинейной эконометрической модели, содержащей в левой части нелинейную функцию зависимой переменной g(уt, b), отлична от соответствующей системы уравнений максимального правдоподобия модели, в новой части которой находятся просто значения зависимой переменной уt. Это отличие обусловлено необходимостью учета якобиана в первом уравнении системы (11.9).
В этом несложно убедиться, рассмотрев систему нормальных уравнений для критерия минимума выражения (11.5). Она в общем случае будет иметь следующий вид:
![]()
![]()
![]()
![]()
В том случае, когда в левой части нелинейной эконометрической модели стоят наблюдаемые непреобразованные значения уt, т. е. g(уt, b)=уt, то очевидно, что первые группы уравнений в системах (11.9) и (11.10) отсутствуют, а вторые – совпадают, с учетом того, что et =уt –ft(a,x).
Второй вывод свидетельствует о том, что выражение для оценки дисперсии нелинейной эконометрической модели при любой ее левой части совпадает с аналогичным выражением (2. ), полученным для линейного его варианта. Как непосредственно вытекает из последнего уравнения системы (11.9), оценка дисперсии нелинейной модели определяется следующим выражением:
![]()
где еt – оценка ошибки et, полученная при оптимальных оценках параметров модели aj, bk, k=0,1,... j=0,1,...
Сопоставим методы максимального правдоподобия и МНК. Заметим, что в методе максимального правдоподобия важное значение имеет выбор обоснованного (правильного) закона распределения ошибки эконометрической модели. Несоответствие исходной гипотезы относительно типа ее закона распределения и реалий может значительно снизить качество оценок параметров нелинейной эконометрической модели, полученных с использованием ММП. В этой связи МНК использует менее строгие исходные предпосылки относительно распределения ошибки модели et, и многие из желательных свойств оценок (состоятельность, эффективность и несмещенность), полученные с использованием этого метода, как правило, сохраняются (хотя бы приблизительно) и для нелинейных моделей при любом законе распределения ошибки.
Вместе с тем, как было показано ранее, и в случае МНК возникает проблема решения нелинейных (нормальных) уравнений, относительно неизвестных значений параметров модели. Эта проблема усложняется при более сложном характере ошибки e (наличии автокорреляционных связей, гетероскедастичности). Кроме того, численные итеративные процедуры получения решений часто не являются универсальными. Их необходимо корректировать с учетом вида нормальных уравнений, в свою очередь, зависящего (см. выражение (11.3)) от предполагаемой формы эконометрического уравнения ft(a, x).
В этой связи на практике, по-видимому, проще определять искомые значения оценок параметров нелинейных эконометрических моделей, используя достаточно общие для всех их возможных вариантов подходы, основанные на использовании итеративных процедур поиска минимума непосредственно рассматриваемой целевой функции, выраженной в виде суммы квадратов ошибки S2.
В дальнейшем, в целях упрощения изложения без ограничения общности будем полагать, что левая часть нелинейной эконометрической модели содержит только непреобразованные значения уt, т. е. g(уt, b)=уt.
Для произвольного (j-го) варианта эконометрической модели, характеризующегося заданной формой основного функционала ft(aj, x), с известными значениями его параметров, представленными вектором a j=(a0 j, a1 j,..., aп j), сумма квадратов его ошибки с учетом выражения (11.4) может быть представлена в следующем виде:
![]()
где еjt – значение ошибки в момент времени t, соответствующее выбранному j-му набору ее параметров, рассматриваемому как оценка “теоретической” ошибки et.
В некоторых исследованиях вместо выражения (11.12) предпочтительнее рассматривать взвешенную сумму квадратов ошибки, определяемую следующим образом:
![]()
![]()
где рt – весовой коэффициент, учитывающий значимость информации в момент t для оценки коэффициентов модели (см. выражения (3.44), (3.45) раздел 3.2); qt=рt2 – весовой коэффициент, учитывающий значимость квадрата невзвешенной ошибки модели.
В некоторых случаях значения коэффициентов qt и рt могут отражать характер гетероскедастичности ошибки рассматриваемой модели (раздел 3.2).
В качестве оптимальных оценок параметров a0, a1,..., aп модели (11.4) в соответствии с критерием минимума суммы наименьших квадратов ошибки должны быть выбраны значения a0, a1,..., aп, обеспечивающие минимум выражения (11.12) (или (11.13)) по всему множеству наборов таких значений, т. е.
![]()
В дальнейшем, без ограничения общности, рассмотрим особенности построения нелинейных эконометрических моделей с использованием выражения (11.12).
При решении задачи минимизации выражения (11.12) на практике необходимо учитывать ряд обстоятельств.
Во-первых, априорно (т. е. до проведения каких-либо расчетов) функция S2(aj) не может быть представлена в аналитической форме записи (например, как многочлен некоторой степени по своим аргументам).
Во-вторых, можно предположить, что эта функция является непрерывной по этим аргументам.
В-третьих, в некоторой области существования минимума она может рассматриваться как выпуклая функция от своих аргументов. В общем случае может допускаться несколько таких непересекающихся областей, на каждой из которых эта функция достигает локального минимума.
При таких, достаточно естественных, условиях задача оценивания параметров нелинейной эконометрической модели является задачей минимизации нелинейного функционала (11.12) в пространстве параметров aj при известных значениях зависимой и независимых переменных уt и хit соответственно, t=1, 2,..., Т; i=0,1,..., n. Для решения такой задачи в предположении о детерминированности исходных данных могут быть использованы хорошо известные методы, в основе которых лежат итеративные процедуры поиска минимума нелинейной функции. В общем случае их можно разделить на две большие группы: методы без производных и методы с производными. К первой группе относится, например, метод прямого поиска, ко второй – метод Гаусса-Зайделя, градиентные методы, метод Макуардта.
В основе приведенной классификации методов лежит достаточно простой признак. Если для реализации метода не требуется рассчитывать значения производных каких-либо функций, то этот метод относится к группе методов без производных. В противном случае, т. е. когда при реализации метода расчет производных необходим, то он относится к группе методов с производными.
При этом заметим, что производные обычно используются при формировании итерационной процедуры поиска минимума функции суммы квадратов ошибки модели по своим аргументам a0, a1,..., aп, основанной на линейной аппроксимации либо формы (функционала) эконометрической модели, либо самой целевой функции, т. е. суммы квадратов ошибки. Вследствие этого методы с производными, в свою очередь, обычно разделяются на две подгруппы. Первую из них составляют методы, предполагающие линеаризацию уравнения модели, а вторую – методы, предполагающие линеаризацию целевой функции. К первой группе, например, относится метод Гаусса-Зайделя, ко второй – градиентные методы, метод Макуардта.
Рассмотрим особенности некоторых из перечисленных методов более подробно.
Поможем написать любую работу на аналогичную тему