Рассмотрим, не прибегая к излишней математической строгости, сначала общий подход к оценке дисперсии прогноза ![]() . Без ограничения общности предположим, что прогнозы
. Без ограничения общности предположим, что прогнозы ![]() получены с использованием линейной эконометрической модели, ошибка которой характеризуется отсутствием автокорреляционных связей.
получены с использованием линейной эконометрической модели, ошибка которой характеризуется отсутствием автокорреляционных связей.
В соответствии с процедурой разработки эконометрического прогноза, рассматриваемое прогнозное значение зависимой переменной у, например, в момент времени Т+1, можно представить как случайную величину, определяемую по линейной модели типа (1.2) с учетом того факта, что ее параметры являются случайными величинами, а значения независимых факторов хi, T+1, i=1,2,..., n; – детерминированные величины:
![]()
где ai, i=0,1,..., n – коэффициенты эконометрической модели, рассматриваемые как случайные величины; eT+1 – случайная ошибка модели в момент Т+1. Представим коэффициенты модели ai в виде суммы их соответствующих оценок, являющихся математическими ожиданиями, и ошибок
![]()
где математическое ожидание аi определено согласно используемому методу, например, МНК (см. выражение (2.8)), а характеристики ошибок Dаi определены как элементы вектора Dа=(X¢X)-1X¢×e (см. выражение (2.9)).
Подставим выражение (12.9) в (12.8). В результате получим
![]()
где показатель
![]()
представляет собой математическое ожидание прогноза, а показатель
![]()
характеризует ошибку прогноза.
Ее дисперсия может быть определена согласно классическому выражению ![]() в предположении о независимости ошибки модели eT+1 и ошибок коэффициентов модели Dаi, i=0,1,..., n; следующим образом:
в предположении о независимости ошибки модели eT+1 и ошибок коэффициентов модели Dаi, i=0,1,..., n; следующим образом:
![]()
![]()
где se2 – оценка дисперсии ошибки модели ![]()
![]() – дисперсия оценки аi, а cov(аi, аj) – ковариация оценок параметров аi и аj. Их значения определены как элементы ковариационной матрицы se2×(Х¢×Х)–1; х0,T+1
º1 (см. выражение (2.18)).
– дисперсия оценки аi, а cov(аi, аj) – ковариация оценок параметров аi и аj. Их значения определены как элементы ковариационной матрицы se2×(Х¢×Х)–1; х0,T+1
º1 (см. выражение (2.18)).
Еще раз отметим, что выражение (12.13) получено в предположении о независимости ошибки модели eT+1 в момент Т+1 и ошибок коэффициентов Dаi, которые согласно выражению (2.9) являются линейными функциями выборочных ошибок модели et, t=1, 2,..., Т.
Выражение (12.13) может быть представлено в матричной форме записи следующим образом:
![]()
![]()
где хT+1¢=(1, х1,T+1,..., хn,T+1) – вектор-строка детерминированных уровней прогнозного фона, представляющего собой набор значений независимых факторов в моменты Т+1.
Приведем также несколько более строгое доказательство выражения (12.14). Для этого запишем расчетное значение прогноза ![]() в векторной форме:
в векторной форме:
![]()
Аналогично представим истинное значение прогноза уT+1
![]()
![]()
где a – вектор-столбец значений параметров модели; eT+1 – значение ошибки истинного прогноза.
С учетом представленных выражений ошибку прогноза согласно (12.6) выразим в следующем виде:
D уT+1=уT+1–![]() =eT+1+хT+1¢×a–хT+1¢×a=
=eT+1+хT+1¢×a–хT+1¢×a=
=eT+1+хT+1¢×a–хT+1¢×(X¢×X)–1× X¢×y. (12.17)
Подставляя в (12.17) вместо вектора наблюдаемых значений зависимой переменной y его выражение y=X×a+e, получим
D уТ+1=eT+1+хT+1¢×a–хT+1¢×(X¢×X)–1× X¢×(X×a+e)=
=eT+1+хT+1¢×a– хT+1¢×a– хT+1¢×(X¢×X)–1× X¢×e=
=eT+1– хT+1¢×(X¢×X)–1× X¢×e. (12.18)
С учетом (12.18) дисперсия ошибки прогноза ![]() определяется следующим выражением:
определяется следующим выражением:
s2(![]() )=M = M–2× хT+1¢×(X¢×X)–1× X¢×M+
)=M = M–2× хT+1¢×(X¢×X)–1× X¢×M+
+ хT+1¢×(X¢×X)–1× X¢×M×X×(X¢×X)–1×хT+1. (12.19)
При справедливости предположений о независимости ошибки eT+1 и вектора ошибок модели e, гомоскедастичности и отсутствии автокорреляционных связей у вектора ошибки модели e имеем
M=0;
M=se2×E.
В этом случае с учетом того, что M=se2 легко показать, что выражение (12.19) преобразуется в выражение (12.14), с учетом замены se2 на se2.
Заметим, что выражение (12.19) определяет все случаи, отражающие возможные свойства ошибки эконометрической модели. В частности, когда у этой ошибки имеются автокорреляционные связи, например, первого порядка, т. е. et=r×et–1 +vt, vt ~N(0, sv2), Cov(v)=sv2×E выражение (12.19) приобретает следующий вид:
s2(![]() )=se2–2×se2×хT+1¢×(X¢×X)–1×X¢×R+
)=se2–2×se2×хT+1¢×(X¢×X)–1×X¢×R+
+хT+1¢×(X¢×X)–1×X¢× Cov(e)×X×(X¢×X)–1×хT+1, (12.20)
где вектор-столбец R=¢;
![]()
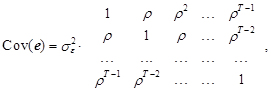
где r – коэффициент автокорреляции первого порядка.
Заметим также, что для такой модели математическое ожидание прогноза ![]() =M имеет следующий вид:
=M имеет следующий вид:
M= M= M= хT+1¢×a+r×eT. (12.21)
Выражая ошибку модели в момент Т eT через ее оценку еT
eT =еT – хT¢×а (12.22)
и подставляя выражение (12.22) в (12.21), с учетом замены коэффициента r на его выборочное значение r и вектора a на вектор a на практике получим
![]() = r× yT+(хT+1¢– хT¢)×a. (12.23)
= r× yT+(хT+1¢– хT¢)×a. (12.23)
Несложно показать, что в этом случае расчетное значение прогноза в момент Т+k будет определяться следующим выражением:
![]() =хT+k¢×a+ rk×eT. (12.24)
=хT+k¢×a+ rk×eT. (12.24)
При наличии у ошибки модели только свойства гетероскедастичности выражение (12.19) приобретает следующий вид:
s2(![]() )=se2+хT+1¢×(X¢×X)–1× X¢×Cov(e)×X×(X¢×X)–1×хT+1, (12.25)
)=se2+хT+1¢×(X¢×X)–1× X¢×Cov(e)×X×(X¢×X)–1×хT+1, (12.25)
![]() где
где
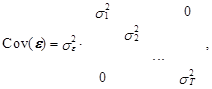
а st2 – дисперсия ошибки модели в момент t.
Поможем написать любую работу на аналогичную тему