Целевая функция типа (2.109) называется функцией максимального правдоподобия. Несложно заметить, что оптимальные значения оценок параметров a0*, a1*,...,
an* и дисперсии фактической ошибки se2, соответствующие ее максимуму, должны обеспечивать и максимум ее логарифма. Иными словами, при определении значений этих оценок можно решать задачу максимизации ![]() В таком случае в условиях независимости разновременных ошибок et и et–i
В таком случае в условиях независимости разновременных ошибок et и et–i

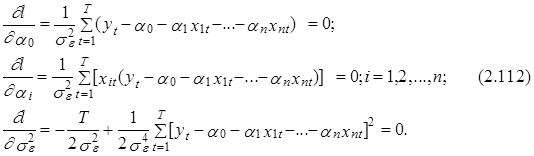
Не принимая во внимание первое постоянное слагаемое в правой части выражения (2.111), заметим, что оптимальные значения a0*, a1*,..., an* и se2 в этом случае могут быть найдены путем решения следующей системы из п+2-х дифференциальных уравнений в частных производных по этим параметрам:
Для получения более компактной векторно-матричной формы записи решения системы (2.112) представим линейную эконометрическую модель в векторно-матричной форме:
у=Х×a+e, (2.113)
где вектор у и матрица Х определены выражением (2.110) и вектор ошибки e имеет такой же вид, как и вектор у; вектор параметров a=(a0, a1,..., an)¢.
На основании (2.113) вектор ошибки можно представить в следующем виде:
e=у –Х×a, (2.114)
и последнее слагаемое в выражении (2.111) записать как скалярное произведение вектора ошибки строки на ее столбец. С учетом этого выражение (2.111) приобретает следующий вид:
![]() (у–Х×a)¢×(у –Х×a). (2.115)
(у–Х×a)¢×(у –Х×a). (2.115)
Дифференцируя выражение (2.115) по неизвестному вектору параметров a и по неизвестной дисперсии ошибки se2, получим следующую векторно-матричную форму записи системы (2.112):
¶l/¶a = ![]() (– Х¢×у+ Х¢×Х×a)=0;
(– Х¢×у+ Х¢×Х×a)=0;
¶l/¶se2=  (у –Х×a)¢×(у –Х×a)=0. (2.116)
(у –Х×a)¢×(у –Х×a)=0. (2.116)
Поскольку se2¹0, из первого уравнения системы (2.116) непосредственно получаем вектор оценок ММП коэффициентов линейной эконометрической модели в следующем виде:
a*=a=(Х¢Х )–1×Х¢×у, (2.117)
а из второго – оценку ММП дисперсии ошибки эконометрической модели:
sе2 = ![]() (у
–Х×a)¢×(у –Х×a)=
(у
–Х×a)¢×(у –Х×a)= ![]()
Заметим, что выражение (2.117) ничем не отличается от своего аналога (2.8), полученного с использованием МНК, а оценка дисперсии ошибки модели, полученная на основании выражения (2.118), является смещенной. Вследствие этого на практике используют несмещенную оценку дисперсии, определяемую следующим образом*:
![]()
Известно, что оценки параметров, полученные с использованием ММП, обладают свойством состоятельности** :
plim(a)=a,
plim(se2)=se2,
имеют асимптотически нормальное распределение и асимптотически эффективны,
![]()
![]()
![]()
![]() a a a
a a a
![]() N , I –1 ,
N , I –1 ,
se2 se2 se2
где ![]() – символ асимптотического приближения, в данном случае закона распределения вектора-столбца оценок к закону нормального распределения с параметрами – их математическими ожиданиями (a,se2)¢ и ковариационной матрицей I–1(a,se2)¢, обратной так называемой информационной матрице этих параметров.
– символ асимптотического приближения, в данном случае закона распределения вектора-столбца оценок к закону нормального распределения с параметрами – их математическими ожиданиями (a,se2)¢ и ковариационной матрицей I–1(a,se2)¢, обратной так называемой информационной матрице этих параметров.
Заметим, что состоятельность оценок ММП следует из совпадения с оценками МНК, которые, как было показано в разделе 2.1.2, являются состоятельными. Асимптотические свойства оценок ММП также определяются стремлением к нулю их дисперсий с ростом числа измерений, что следует из свойств элементов матрицы I–1(a,se2).
Напомним, что I (z) – информационная матрица случайного вектора z, определяется следующим образом:
I (z)= – M, (2.120)
где матрица ¶2l/¶z¶z¢ имеет следующий вид:
![]()
¶2l/¶ z ¶ z¢ = 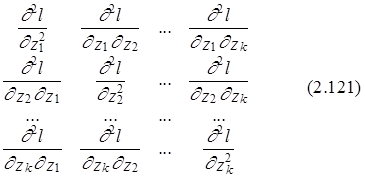
и в нашем случае k=n+2 и z1=a0,..., zk– 1=an , zk =se2.
Выполнив двойное дифференцирование выражения (2.116) по вектору a и se2, получим
¶2l/¶a¶a¢=–Х¢Х/se2 ; –M=–Х¢Х/se2 ;
¶2l/¶a¶se2=–Х¢e/se4; –M=0.
Последнее равенство выполняется в силу предполагаемой независимости значений факторов хit (столбцов матрицы X) и ошибки e, являющейся “белым шумом”.
¶2l/(¶se2)2=T/2se4–e¢e/se6; –M=T/2se4, поскольку M=T×se2.
Таким образом, информационная матрица вектора (a, se2)¢ определяется следующим выражением:
![]()
![]() I
I ![]()
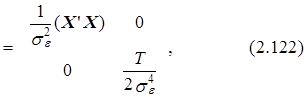
а ковариационная матрица этого вектора имеет следующий вид:
![]()
![]() I–1
I–1 ![]()
где ![]() (Х¢Х)–1 – представляет собой ковариационную матрицу вектора оценок параметров a, а
(Х¢Х)–1 – представляет собой ковариационную матрицу вектора оценок параметров a, а ![]() – дисперсию дисперсии модели se2.
– дисперсию дисперсии модели se2.
Из выражения (2.123) вытекает, что ковариационная матрица вектора оценок параметров линейной эконометрической модели (1.2) имеет следующий вид:
Cov(a)=se2 ×(Х¢×Х)–1=Wa@se2 ×(Х¢×Х)–1. (2.124)
В выражении (2.124) учтено, что на практике оценка дисперсии истинной ошибки se2 может быть заменена ее оценкой se2, определенной согласно выражению (2.119) с использованием “фактических” значений ошибки et .
Из выражения (2.124) непосредственно следует, что дисперсии оценок параметров линейных эконометрических моделей ![]() , определенных по ММП, являются диагональными элементами матрицы se2×(Х¢×Х)–1. Напомним, что среднеквадратические ошибки этих параметров (
, определенных по ММП, являются диагональными элементами матрицы se2×(Х¢×Х)–1. Напомним, что среднеквадратические ошибки этих параметров (![]() ) используются при определении значимости факторов модели (см. выражение (1.25)).
) используются при определении значимости факторов модели (см. выражение (1.25)).
Таким образом, из результатов раздела 2.5 вытекает, что при предположении о нормальном законе распределения ошибки эконометрической модели и ее свойствах, определенных выражениями (2.20)–(2.24), оценки ее коэффициентов, полученные с использованием методов максимального правдоподобия и наименьших квадратов совпадают. Аналогичное совпадение отмечается и у ковариационных матриц этих оценок. Несложно показать, что в этих условиях у МНК и ММП совпадают также оценки параметров эконометрических моделей, полученные при ограничениях на их значения (см. выражение (2.91)).
Если же ошибки модели распределены по другому закону (например, Гаусса с тяжелыми хвостами, Стьюдента и т. п.), то вообще говоря, выражения для оценки коэффициентов, полученные на основе ММП, будут отличаться от их аналогов, полученных с использованием МНК.
Поможем написать любую работу на аналогичную тему